調査
管路施設を長期間維持させるためには、清掃はもとより、管渠内の異常個所の早期発見が必要となります。
定期的な調査をすることにより、陥没等を早期に発見することができ、管の延命化をはかることにもつながります。
目視調査、カメラ調査、染料調査、送煙調査、衝撃弾性波調査等 状況に応じた調査を行います


目視調査
目視調査は主に、マンホール目視調査、大口径管内調査等があります。
マンホール目視調査は、ふた及びその周辺状況を目視により、詳細に調査します。
調査員がマンホール内に入り、テストハンマー、スケールなどを用いて調査します。
大口径管内調査は目視により調査し、異常個所は写真撮影を行いデータに残します。
カメラ調査
カメラ調査では、目視不可能な場所にテレビカメラを使用し調査します。
低予算で確実に、管路施設の保守点検・欠陥調査を行えるのが、テレビカメラによる映像調査です。
モニターで映像を確認しながら調査する為、正確な異常箇所の判定が可能となります。
また、報告書システムにより、映像処理と同時に報告書資料が記録されます。
長年の実績と多角的な方法にてご対応します。


下水小中口径カメラ調査
管渠内径800mm未満の管内調査は、一般に小中口径テレビカメラを使用します。
新設下水道管の竣工時確認調査や、既設下水道管の管内確認に、自走式テレビカメラ、また取付管閉塞等の確認に、取付管用カメラを使用し調査します。
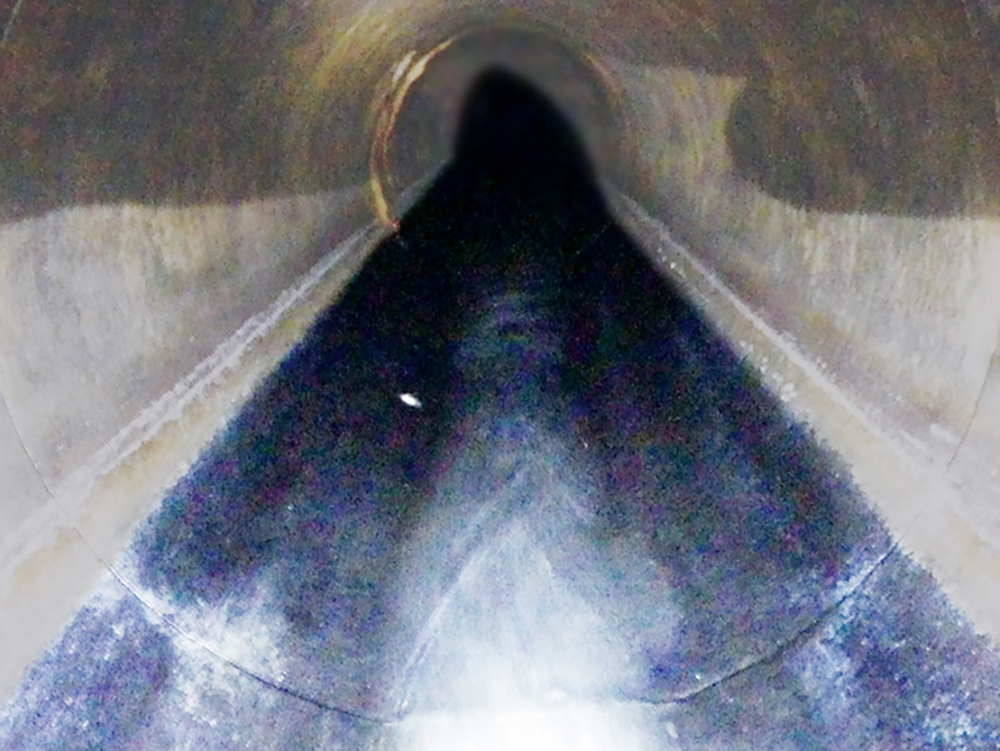
大口径カメラ調査
800mm以上の管渠には大口径カメラを使用します。
潜行目視調査では、酸素欠乏や有害ガスによるリスクが高くなり、また大量の流水による危険作業が伴うため、大口径カメラ調査を行います。


特徴
- 360度死角無し
- 光学10倍ズーム
- 調査可能管径 150mm~2,000mm
取付管カメラ調査
取付管TVカメラ調査は、事前に取付管内の高圧洗浄を実施し、取付管用TVカメラにより管内を調査するとともに、その状況を撮影するものです。
直視カメラを使用し、基本的には公共桝から本管に向けてロッドでカメラヘッドを押し込む方法が取られます。
そのほか、ハードケーブルでカメラヘッドを押し込み調査する方法もあります。
染料調査
排水設備の接続状況を確認するために、無害な染料希釈液を対象管路の上流より流し、流下経路、漏出個所、到達時間等を調査します。

注入前(上流)

注入中(上流)

排水経路確認(下流)
送煙調査
管路施設内に煙を送り込み、漏煙箇所から溶接不良や老朽化、地形のゆがみなど、漏れている箇所がないか調査します。
衝撃弾性波調査
既設管及び更生管に衝撃を与えることにより、発生する振動をセンサーで検知し、その波形を解析することで劣化状況を調査します。
清掃洗浄
清掃・洗浄は、施設の構造や場所によって状況が異なり、それに合わせた作業車や設備が必要となりますので、正確な判断により、選択された機器を使用しなければなりません。
永年の経験から作業効率を考え、対処可能な車両・人材を配備し、臨機応変に効率的作業が可能な体勢を整えております。
また、鉄道等横断通路、公園施設やアーケード等の洗浄も行っており、壁面等の隙間に付着している汚れにも対応可能です。

槽内清掃

ダム内浚渫

排水管清掃

融雪溝清掃
高圧水による洗浄・清掃
高圧洗浄車を使用し、耐圧ホースに噴射ノズルを取り付け、水圧により前方を切り崩しながら前進します。
管路内を前進したノズルをゆっくり巻き戻すことにより、手前に汚泥をかき集め、堆積した汚泥を吸引し、洗浄します。
吸い上げた汚泥は適正に処理します。

清掃前

清掃中
清掃後
吸引車による清掃
河川、池、側溝、パイプラインや開水路などに溜まった土砂やごみ等の堆積物を、吸引車と高圧洗浄車を併用し、底面をさらって取り除く作業です。
側溝に枯葉や泥が溜まりすぎると流れが悪くなり、溢れたり悪臭が発生したりと、トラブルの原因となります。
そのため、堆積物を高圧洗浄による水圧で開口部まで寄せて吸引除去します。


雑排水槽・グリーストラップ 清掃
旅館・ホテル・レストラン、飲食店、給食センターなど、雑排水槽の清掃を行っております。
雑排水槽は、厨房・調理場からの排水に含まれるゴミや油脂を分離・収集するための設備で、油脂等が下水道や浄化槽に流れ込むと、排水管の詰りや害虫、悪臭など、衛生環境に悪影響を与える大きな要因となります。
また、除去した廃棄物は産業廃棄物となるため、産廃処理業者による適正な処理が必要となります。

清掃前

清掃中

清掃後

清掃前

清掃中

清掃後
補修更生
下水管あるいは農業用水管等、様々な管路施設の補修に、多種多様な工法の中で最も適切な工法を用いて作業を行います。
管の更生は、改築や修繕による工法の他、止水管の補助的な工法も有り、様々な工事に迅速に対応する技術力と設備を備えております。
テレビカメラで確認し、確実に問題個所が特定できるので、掘削や大掛かりな工事をせず、経費削減をはかれます。

ニーズに応える豊産管理のラインナップ
オールライナー工法
オールライナー・オールライナーZ工法は、工場で含浸された更生材を管内に引き入れた後、更生材に水圧、空気圧にて拡径し、水を加熱・循環させ樹脂を硬化形成させることにより、既設管きょに新しい管きょを形成する非開削の工法です。
また、オールライナーZ工法は更生材にガラス繊維を配置させることにより、物性を向上させています。
なお、鉄道横断管路内のしゅんせつや調査・補修を行う際に、作業車を隣接できない場合、軌陸車を使用して、施工箇所まで機材を運搬し作業にあたります。
※軌陸車とは、軌道と道路の両方を走ることのできる車両です。
パートライナー工法
パートライナー工法は、損傷した管きょ内面にFRPライニングを形成する非開削の補修工法です。ガラス繊維マットに熱硬化性樹脂を含浸させ補修機にまきつけ、損傷箇所に引き込み空気圧により圧着し、樹脂を硬化させFRPを形成します。また、パートライナーS工法は、取付管との接続部の補修を可能としました。
サイドライナー工法
サイドライナー工法は、硬化性樹脂を含浸させたホースと成形用のホースからなるダブルホースを取付管内に反転挿入し、樹脂の硬化後、成形用ホースを撤去することによって既設取付管に新しい管きょを形成する非開削の工法です。
SPR工法
SPR工法は既設管の内側に硬質塩化ビニル製プロファイルの更生管を製管し、既設管と更生管の間隙に特殊裏込め材を充填。
古くなった管きょを既設管・更生管・裏込め材が一体となった強固な複合管として蘇らせます。
オメガライナー工法
オメガライナー工法は、あらかじめ工場でω状に折りたたんだ形状記憶性能をもつ硬質塩化ビニル管を既設管内に引き込み、蒸気で加熱することで円形に復元し、圧縮空気により既設管と密着させ強固な自立管を構築する工法です。
光硬化工法
紫外線による硬化のため、環境温度に左右されず、夏場でも冬場でも同じ時間で管路を更生する工法です。
EPR工法
EPR工法は、ガラス繊維に常温硬化性エポキシ樹脂を含浸させたライニング材を施工現場で硬化させることにより、老朽化した下水道管きょを非開削で補修・更生する技術です。
EPR-LS工法
EPR-LS工法(取付管)は、ガラス繊維にエポキシ樹脂を含浸させたライニング材を施工現場で硬化させることにより、老朽化した下水道管きょを非開削で更生する技術です。
MLR工法
MLR工法とは、(Manhole Lining Renewal)の略称で、硫化水素等で腐食し、耐用年数及び強度が低下したマンホールに、強度と防食性を付与し、耐用年数を向上させる非開削マンホール更生技術です。
スナップロック工法
スナップロック工法は、管径700mm以下を対象に管継手部やクラックから発生する浸入水(漏水)を止水する非開削修繕工法です。
マグマロック工法
マグマロック工法は、これまでに埋設された耐震化を有さない既設管きょ及びマンホール継手部を対象に、短時間で耐震構造に改善することを目的に開発された非開削耐震化工法です。
止水工法 薬液注入
既設下水道管渠等において、開削による補修が不可能な場所や、長期にわたり浸入水等の影響による地盤の空洞化に、非ウレタン系止水剤を充填することにより、地盤沈下や浸入水を防止する工法です。方法としてはY字管による注入と、パッカーによる工法があります。
穿孔(下水道管内穿孔ロボットシステム)
φ200m/m~600m/mの管内において、更生工事前のモルタル、取付管突出等の除去及び工事後における取付管口の穿孔を目的とするロボットシステムです。
穿孔システム自体は、コンパクト設計により、ワンボックス車に搭載しているので、狭い道路上でも、施工可能です。





